You will get MATLAB robot navigation model using PRM and pure pursuit algorithms
Top Rated
Project details
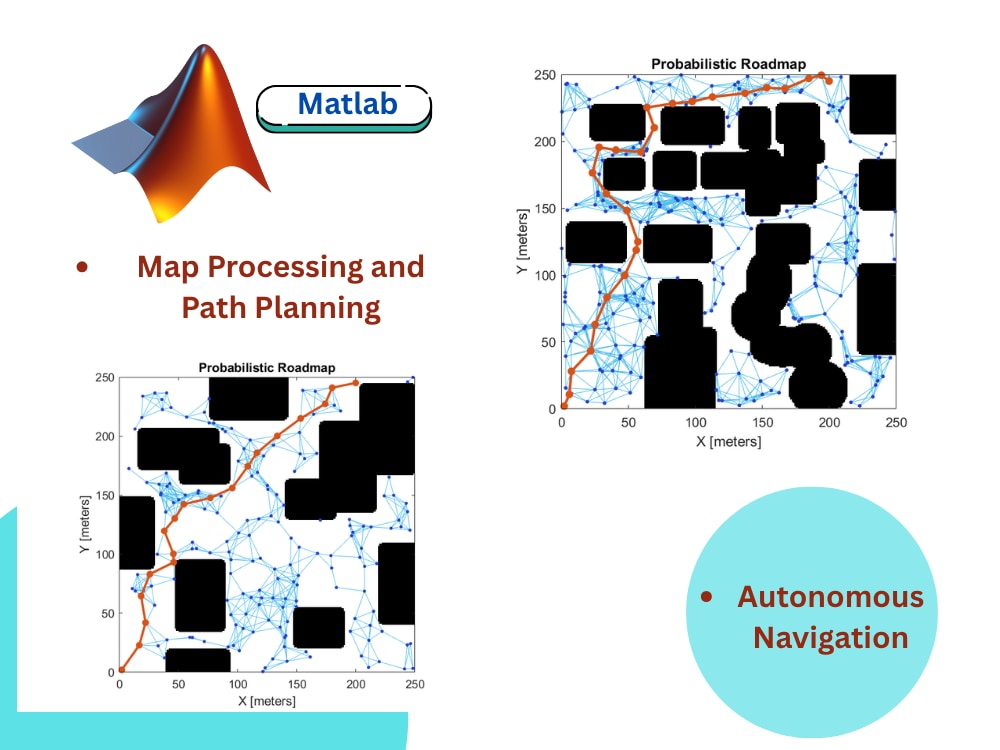
You will get a professionally implemented robot navigation model in MATLAB using the Probabilistic Roadmap (PRM) and Pure Pursuit algorithms. This solution is ideal for robotics enthusiasts, students, or researchers who need a complete simulation of autonomous path planning and real-time path tracking in complex environments.
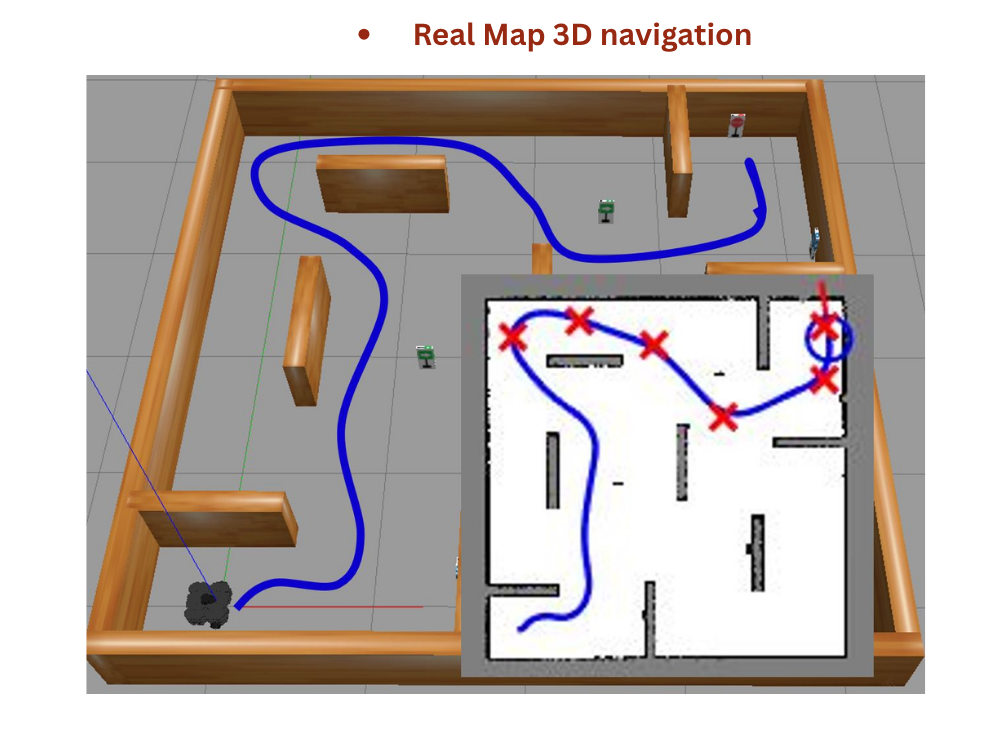
With deep expertise in robotics modeling, control systems, and MATLAB programming, I offer more than just code—I deliver robust, documented, and efficient simulations that mirror real-world navigation challenges. Whether it’s navigating a custom environment or a real map (like a city or warehouse layout), my models are optimized for accuracy, adaptability, and performance.
The work I deliver is clean, simulation-ready, and validated with performance metrics like path efficiency, coverage, and waypoint optimization. You can expect clear communication, technical excellence, and a strong focus on your specific use case.
With deep expertise in robotics modeling, control systems, and MATLAB programming, I offer more than just code—I deliver robust, documented, and efficient simulations that mirror real-world navigation challenges. Whether it’s navigating a custom environment or a real map (like a city or warehouse layout), my models are optimized for accuracy, adaptability, and performance.
The work I deliver is clean, simulation-ready, and validated with performance metrics like path efficiency, coverage, and waypoint optimization. You can expect clear communication, technical excellence, and a strong focus on your specific use case.
Data Tool
MATLABWhat's included
| Service Tiers |
Starter
$50
|
Standard
$120
|
Advanced
$200
|
|---|---|---|---|
| Delivery Time | 2 days | 4 days | 6 days |
Number of Revisions | 1 | 2 | 3 |
Number of Graphs/Charts | 2 | 4 | 6 |
Number of Scenarios | 1 | 3 | 6 |
Number of Model Variations | 0 | 0 | 0 |
Model Documentation | |||
Data Source Connectivity | - | - | |
Model Validation/Testing | - |
Optional add-ons
You can add these on the next page.
Fast Delivery
+$10 - $30Frequently asked questions
1 review
(1)
(0)
(0)
(0)
(0)
This project doesn't have any reviews.
EL
Evgenia - Charikleia L.
Mar 16, 2026
MATLAB Specialist Needed for review of EEGLAB Code
It was a pleasure working with Dennis. They were highly professional, responsive, and delivered excellent results that met all project requirements. Communication was smooth, deadlines were respected, and the quality of work exceeded expectations. I would gladly hire them again and highly recommend them to others.
About Dennis
MATLAB & Simulink Developer | Control Systems | Electrical Systems
100%
Job Success
Nairobi, Kenya - 6:30 am local time
With over five years of proven experience in system design and modeling, I consistently deliver high-quality results on time. I specialize in control systems, systems engineering, and advanced model simulation, covering both mathematical and data-driven modeling approaches.
My background spans multiple engineering domains, including electrical engineering and biomedical engineering, enabling me to tackle complex, multidisciplinary challenges. I’ve worked across diverse industries such as application development and medical devices—and on a lighter note, I have a genuine love for space and anything related to space travel.
Clear communication is central to my process. By fully understanding your project requirements, I ensure the final deliverables meet—and exceed—expectations. The result is client-ready work that leaves a lasting impact.
All work is completed personally by me—never outsourced—so you can rely on consistency, accountability, and attention to detail. I am committed to timely delivery without compromising on quality.
Steps for completing your project
After purchasing the project, send requirements so Dennis can start the project.
Delivery time starts when Dennis receives requirements from you.
Dennis works on your project following the steps below.
Revisions may occur after the delivery date.
Analyze Map or Environment
I will review the provided map or environment details, preprocess it (e.g., grayscale, binary conversion), and create an occupancy grid for use in path planning.
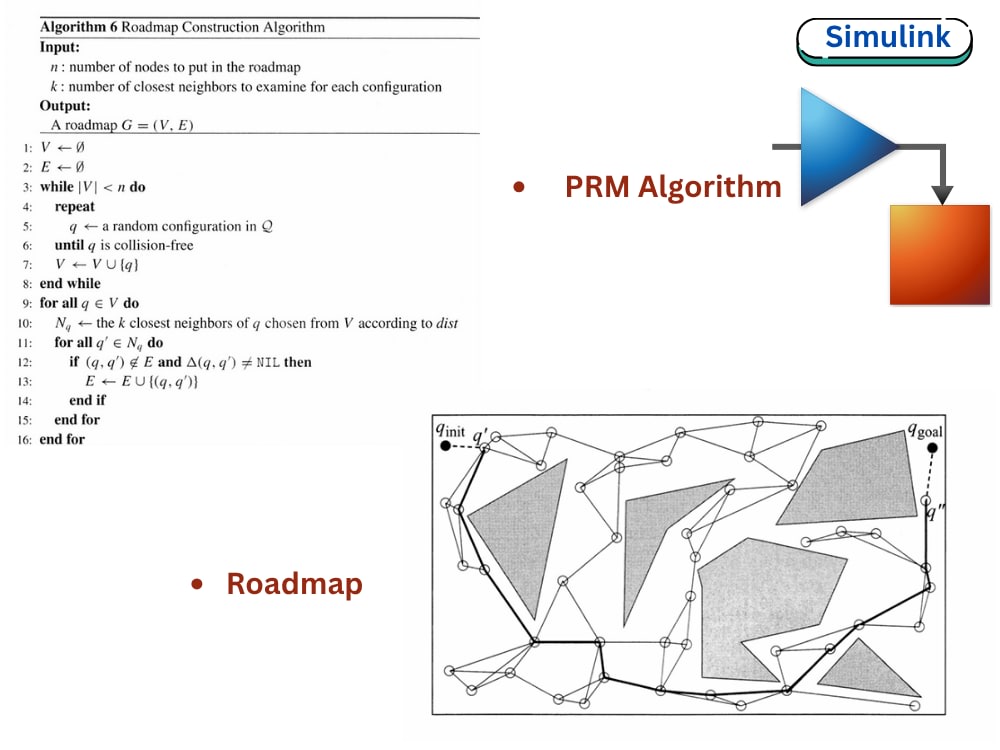
Implement PRM Path Planning Algorithm
Using MATLAB, I will generate a Probabilistic Roadmap (PRM) to create a feasible path from the robot’s starting position to its goal while avoiding obstacles.