You will get Deep Learning Solution for Teeth-Gum Separation & Numbering(FDI or ADA)
Top Rated
Top Rated
Project details
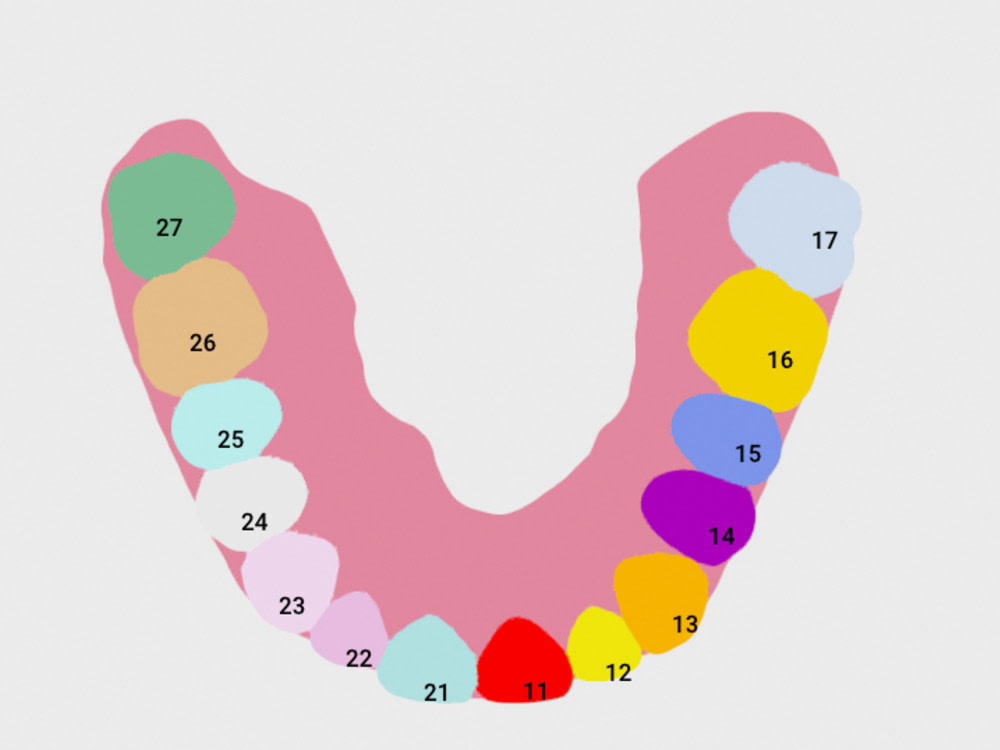
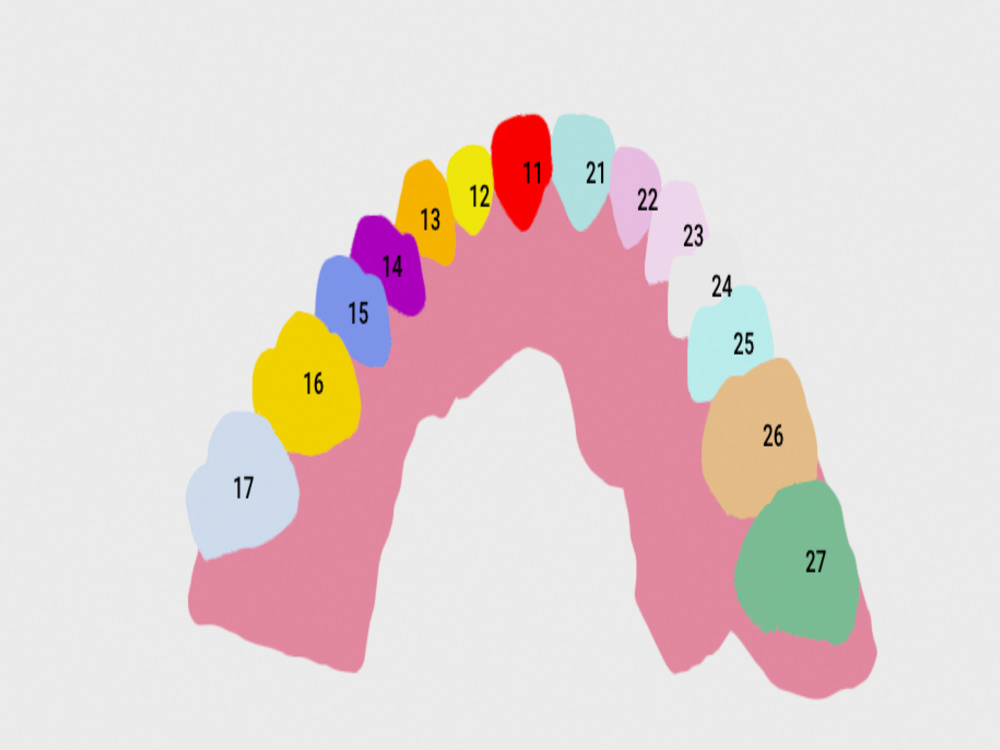
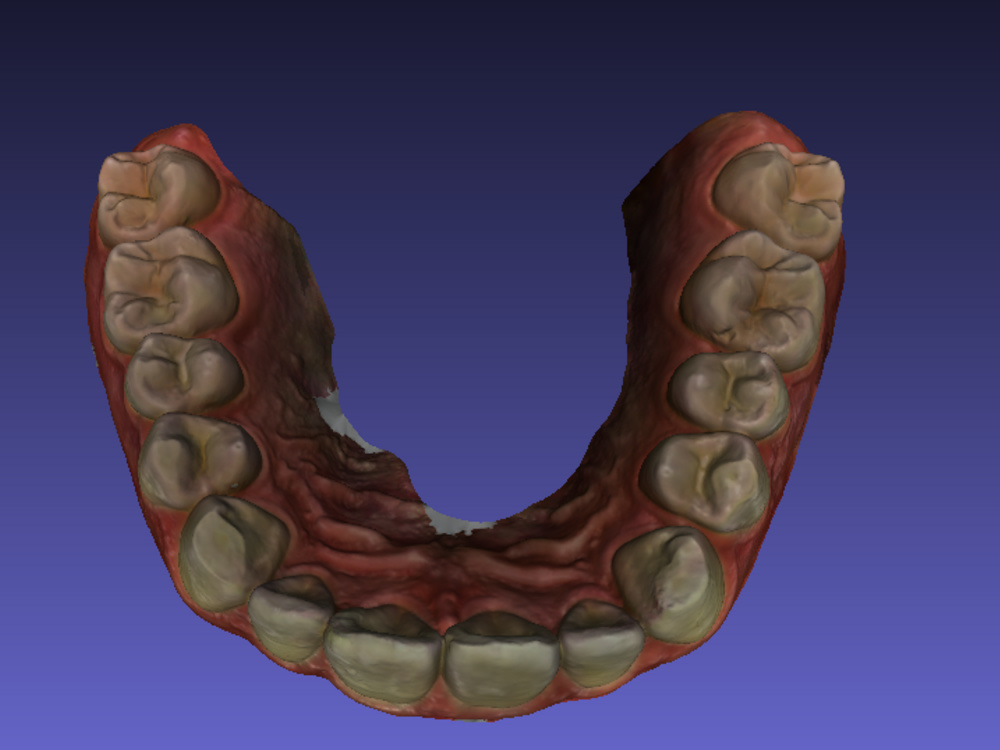
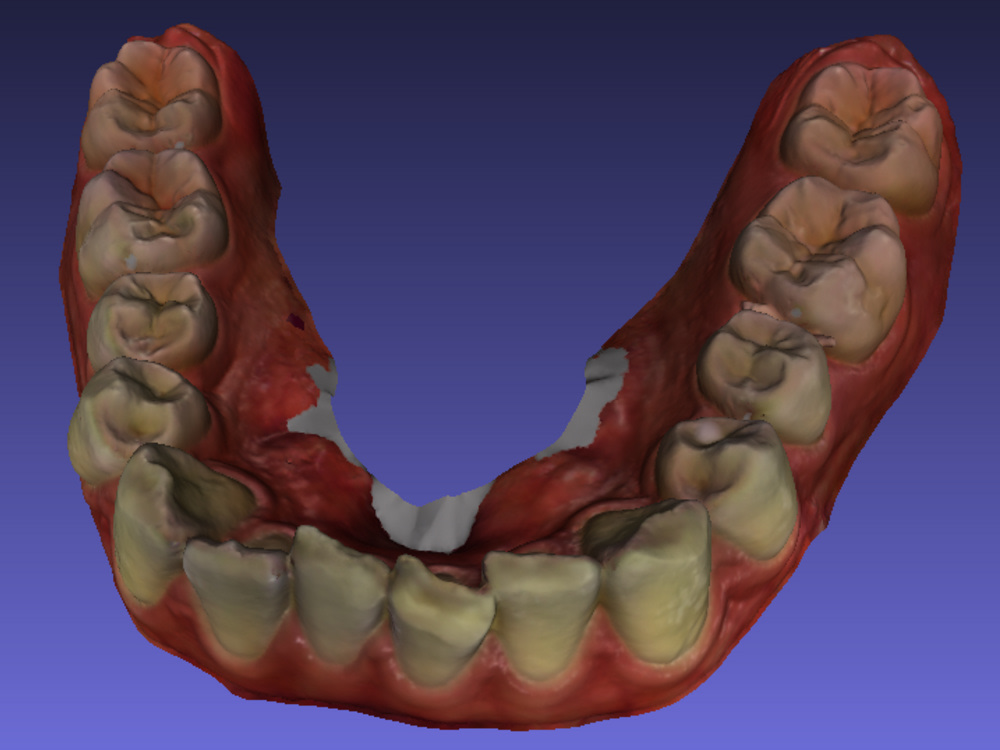
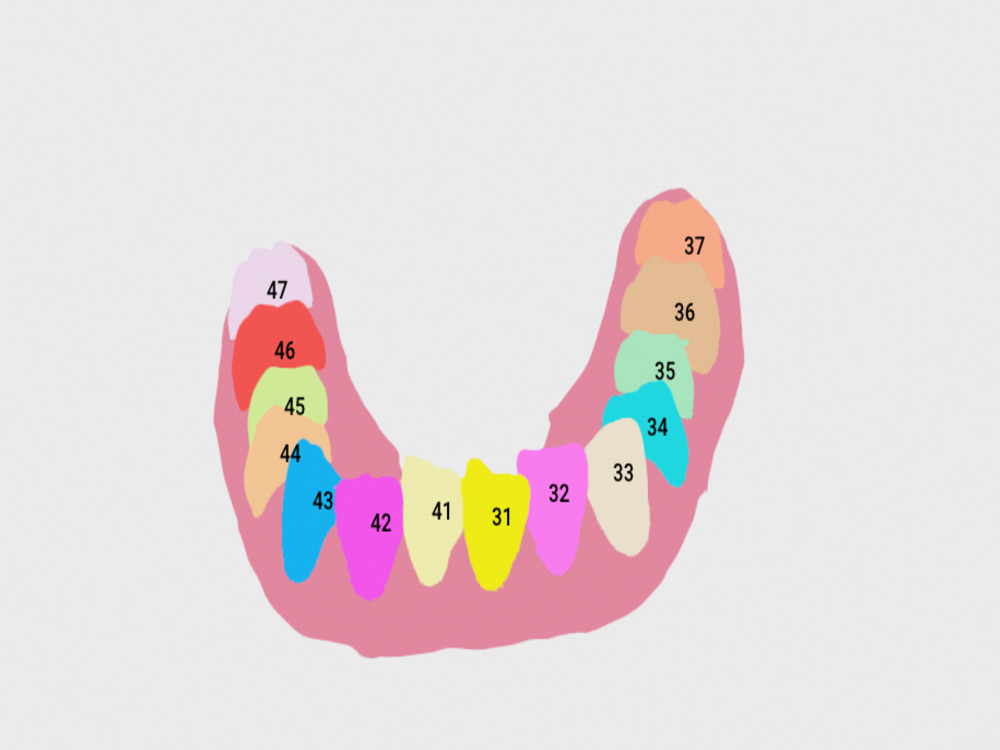
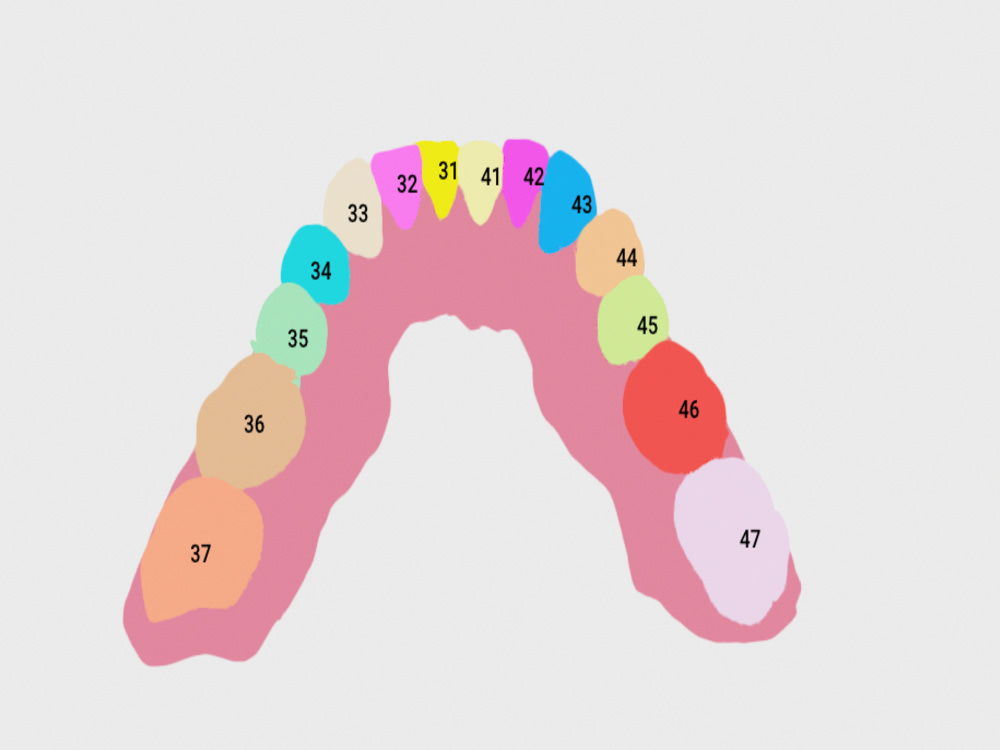
I offer a deep learning-powered solution for automatic dental segmentation and numbering from 3D jaw scans. This system segments teeth from gum tissue and assigns FDI or ADA tooth numbers with high accuracy. Results are visualized using Open3D with clearly labeled, color-coded teeth, making it ideal for dental analysis, education, or integration into clinical workflows. No fine-tuning required—just plug in your scan and get structured outputs.
Machine Learning Tools
NumPy, OpenCV, Python, PyTorch, TensorFlowWhat's included $3,000
These options are included with the project scope.
$3,000
- Delivery Time 1 day
- Number of Revisions 1
- Number of Model Variations 1
- Number of Scenarios 2
- Number of Graphs/Charts 2
- Model Validation/Testing
- Data Source Connectivity
- Source Code
Optional add-ons
You can add these on the next page.
Additional Scenario
(+ 1 Day)
+$200
Model Documentation
(+ 1 Day)
+$500
Integrate 3D Teeth–Gum + FDI Labels into an OpenGL Qt Widget (Python/C++)
(+ 2 Days)
+$700
30 reviews
(28)
(0)
(1)
(1)
(0)
SS
Swati S.
Aug 30, 2025
DS
DAn S.
Jul 1, 2026
ROS 2 + NVIDIA Isaac Sim Cloud HIL Integration (Jetson Orin Nano → AWS Server, Multi-Robot Ready)
CM
Carlos M.
Jun 11, 2026
Color Detection
It has been a pleasure working with Abdalrhman. They consistently delivered high-quality code on time, communicated proactively, and adapted quickly to changing requirements. I would not hesitate to recommend them for any development role.
KF
Kevin F.
May 1, 2026
Industrial Scanner Engineer – Vision Hardware + System Integration
Good contractor provided on time and price. We had some other issues so we have had to place his part on shelf- these issues did not relate to the contractor.
SS
Swati S.
Aug 30, 2025
You will get Deep Learning Solution for Teeth-Gum Separation & Numbering(FDI or ADA)
SS
Swati S.
Jul 8, 2025
code to implement AES-128 encryption in GCM mode with AAD
Good work and communication during project
About Abdalrhman
Robotics Software Engineer | ROS2 | SLAM | PX4 | Computer Vision
92%
Job Success
Cairo, Egypt - 8:36 pm local time
I’m a Robotics Software Engineer with strong hands-on experience in ROS 2 robotics development, autonomous mobile robots, SLAM, sensor fusion, and robotic arm manipulation. I work on real production systems used by customers — not experiments or demos.
My experience spans real-time perception, planning, and control pipelines, deployed on physical robots in medical, industrial, and outdoor environments.
🔧 Robotics & ROS Expertise
ROS 2 / ROS 1 development (Nav2, MoveIt / MoveIt 2, ros2_control)
Autonomous navigation for indoor and outdoor robots
SLAM & localization (Cartographer, SLAM Toolbox, LiDAR SLAM, Visual SLAM)
Sensor fusion using EKF / UKF (GNSS, IMU, wheel odometry, LiDAR)
Experience with UGVs, delivery robots, quadrupeds, and robotic arms
Robot simulation using Gazebo and NVIDIA Isaac Sim
📡 Sensors, Perception & Real-Time Processing
Integration of LiDAR, depth cameras, stereo cameras, GNSS, IMUs
Cameras: Intel RealSense, ZED
Real-time 3D perception pipelines using PCL & Open3D
TensorRT optimization for real-time inference on edge devices
GPU-accelerated computer vision and perception
Photogrammetry and dense 3D reconstruction
🦾 Robot Arms & Medical Robotics (Production Systems)
Extensive experience with robotic arms in production medical and industrial applications
Platforms: xArm, ABB, UR robots
MoveIt / MoveIt 2 motion planning
Collision-aware trajectory planning in tight and constrained spaces
Multi-year development of a production dental robotics platform:
Real-time surface-following motion for teeth cleaning
High-precision manipulation with strict orientation constraints
Perception-driven toolpath generation from 3D scans
Deployed and tested on real hardware
🧠 Computer Vision & AI (Applied, Real-Time)
OpenCV-based computer vision for robotics
Object detection & segmentation (YOLO, SSD, U-Net, SAM)
Real-time AI pipelines optimized for deployment
Practical AI for robotics perception — not research-only models
🧰 Engineering & Production Deployment
Python and C++ for performance-critical robotics systems
Linux, Docker, and reproducible deployments
Debugging and tuning real robots in production
Long-term ownership of complex robotics codebases
Clear documentation and structured handover
✅ Why Clients Hire Me
I work on real production robots, not proofs of concept
I design real-time systems that survive real environments
I can debug complex ROS, SLAM, and motion-planning issues
I take ownership from architecture to deployment
Ideal for long-term, high-responsibility robotics projects
If you’re looking for a ROS 2 robotics engineer, SLAM developer, robot arm motion-planning expert, or real-time perception engineer, I can help you build a system that works reliably in the real world.
Steps for completing your project
After purchasing the project, send requirements so Abdalrhman can start the project.
Delivery time starts when Abdalrhman receives requirements from you.
Abdalrhman works on your project following the steps below.
Revisions may occur after the delivery date.
Run segmentation and generate visualization
I will run the deep learning model on the provided 3D jaw scan (OBJ/STL/PLY), segment teeth and gums, assign FDI or ADA numbers, and generate a visual result using Open3D.
Client reviews and approves your work, and I get paid.