You will get object detection project for real life or simulation
Project details
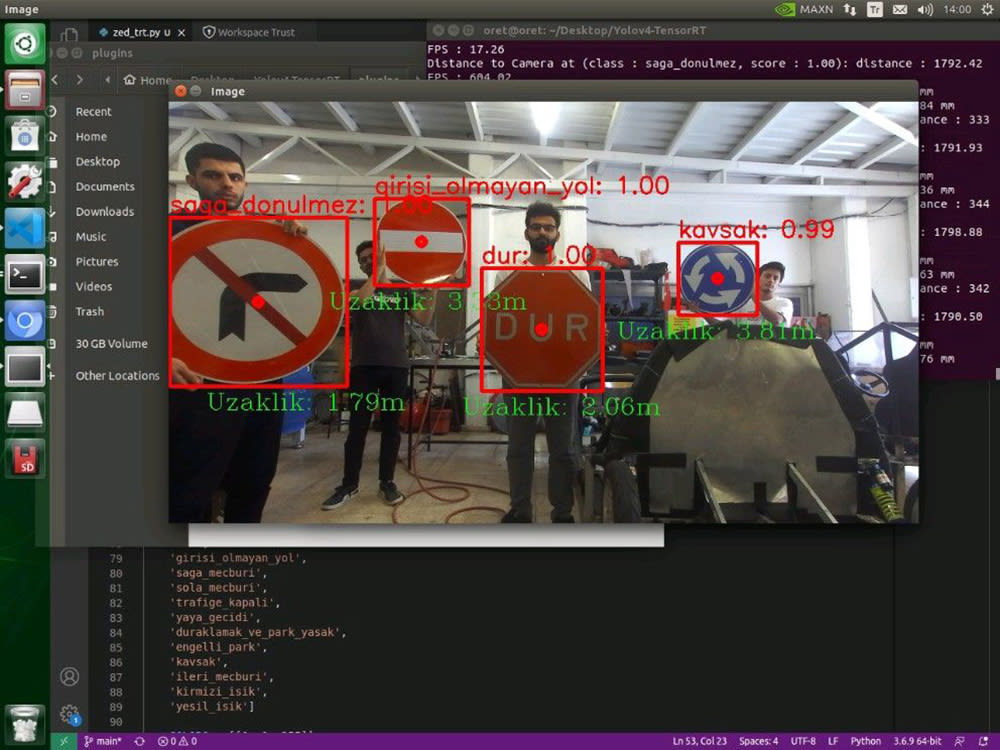
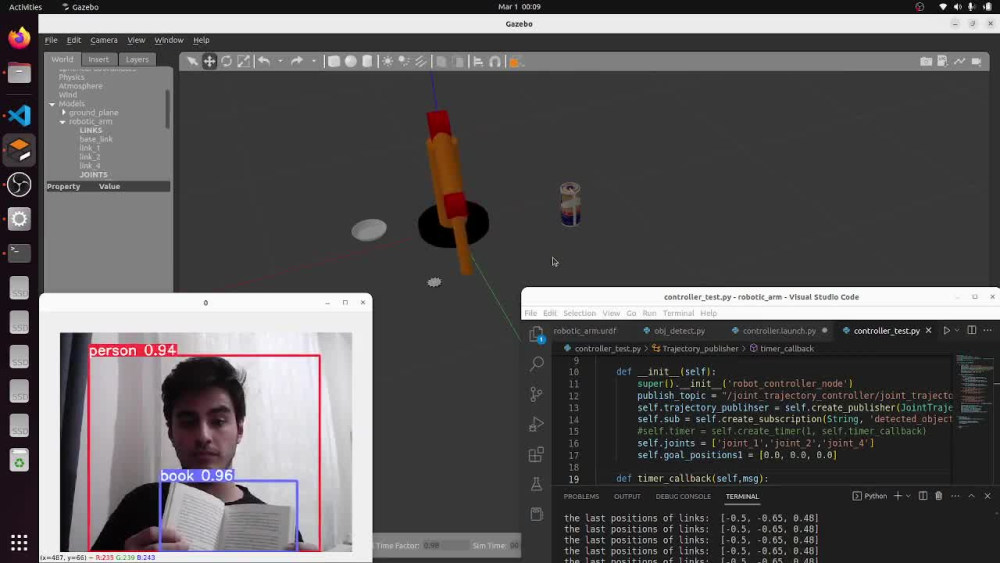
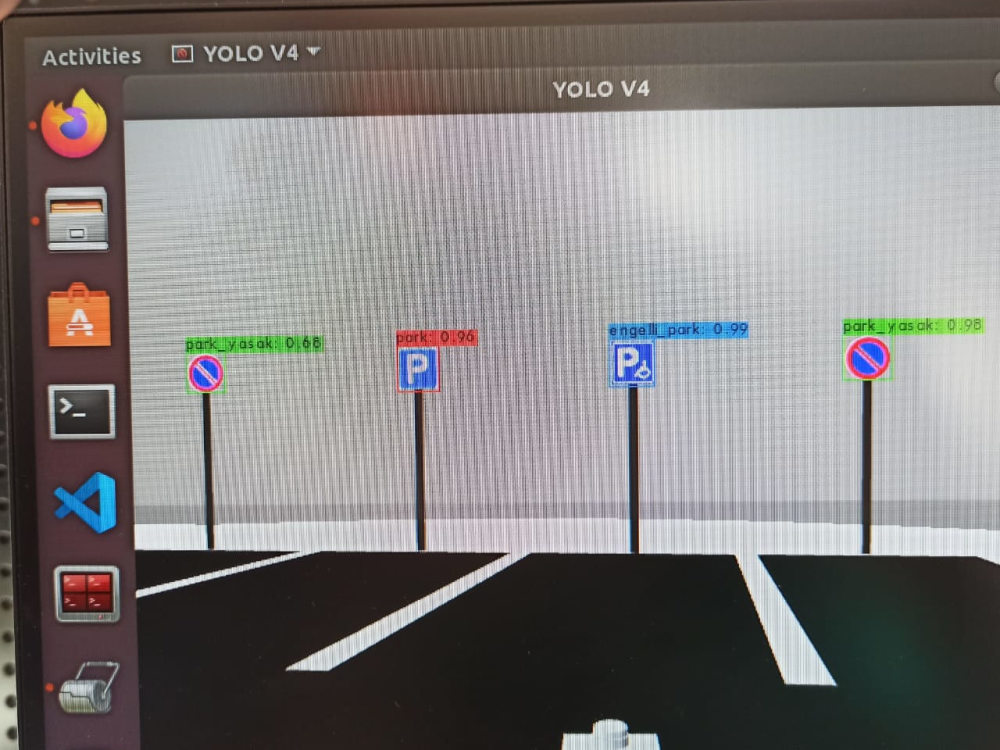
In this project you will get object detection model. You can detect any object with camera in real life or in Gazebo simulation using ROS1 or ROS2. After the created model we can develop some algorithms such as object counter.
Machine Learning Tools
NumPy, OpenCV, Python, Python Scikit-Learn, PyTorchWhat's included $140
These options are included with the project scope.
$140
- Delivery Time 5 days
- Number of Revisions 1
- Number of Model Variations 1
- Number of Scenarios 1
- Number of Graphs/Charts 1
- Model Validation/Testing
- Model Documentation
- Source Code
Optional add-ons
You can add these on the next page.
Collect data and labelling
(+ 2 Days)
+$30
3 reviews
(2)
(0)
(0)
(0)
(1)
This project doesn't have any reviews.
LP
Li P.
Oct 6, 2024
Development of Ball Detection and Tracking Windows Software
No work, no responsive
JB
Julien B.
Sep 22, 2024
Export a list Google Maps with phone number + email
KZ
Kei Z.
Sep 19, 2024
State Machine and Behavior Tree Task with quadcopt
Very good worker, exceeds expectations.
About Gursel
Autonomous Robot | ROS1 & ROS2 | Computer Vision | Data Science | ML
67%
Job Success
Istanbul, Turkey - 10:26 pm local time
✅ 4+ years experience in ROS, Autonomous Vehicles and Computer Vision.
✅ I am interested in Control Systems and Mechanism.
👨💻Technical Expertise:
- Robot Operating System (ROS1 & ROS2).
- Machine Learning & Neural Networks (YOLO, Darknet, PyTorch, Sklearn).
- SLAM (Simultaneous Localization and Mapping).
- Autoware Autonomous Driving Package.
- OpenCV, PCL (Point Cloud Library).
- Python, C++, Linux.
- MoveIt Motion Planning Framework (Inverse and Forwad Kinematics Calculator).
- Simulation (Gazebo, RViz, MATLAB/Simulink).
- Ardupilot, PX4 and QGroundController.
- Sensors Usage (3D/2D Lidar, IMU, Stereo Camera).
- Arduino and NVIDIA Jetson Developer Kits.
- Adobe Photoshop
📋 Last Projects:
- Differential Drive Autonomous Mobile Robot with ROS2.
- Autonomous Chess-Playing Robot Arm with ROS1
- Traffic Sign Detection using YOLO and optimization with TensorRT for Autonomous Vehicle.
- Mapping and Localization Task for Autonomous Vehicle using LIDAR, IMU, GPS and Camera.
- Simulation of Fixed Wing UAV using PX4, MAVLINK/MAVROS and QGroundControl.
- Moving Robotic Arm Links with respect to Detected Object with YOLOv8.
- Humanoid Robot Simulation with ROS1.
- Extracting data from Google Maps (Web Scraping)
Why Work With Me?
ROS1/ROS2 Specialist: Experienced in autonomous robot and control, mapping and localization packages.
Object Detection and Algorithms Development: Preparing dataset and training with YOLO (Darknet backbone) to created object detection model.
Steps for completing your project
After purchasing the project, send requirements so Gursel can start the project.
Delivery time starts when Gursel receives requirements from you.
Gursel works on your project following the steps below.
Revisions may occur after the delivery date.
Preparing Dataset
Before the train model we have to prepare dataset.
Training
In this step train process will start.